Maquinas simples
1.¿que entiende por maquina simple?
mencione tres ejemplos
2.¿cuales son los tres elementos que componen una maquina simple? de un ejemplo
3.explique los dos tipos de maquinas que existen
4.¿que es una palanca?
5.explique los tres géneros de palanca,dibuje e identifique los elementos en cada una de ellas
6.explique que es una polea fija, recreela con un dibujo
7.explique que es un plano inclinado , realice un dibujo de el.
8.elabore una historia que relacione las maquinas simples mencionadas. realice un dibujo
9.explique cuales son los tres elementos que la componen y el genero de palanca para las siguientes gráficas
Solución
1.Una máquina simple es un dispositivo mecánico que cambia la dirección o la magnitud de una fuerza.23 Las máquinas simples también se pueden definir como los mecanismos más sencillos que utilizan una ventaja mecánica(también llamada relación de multiplicación) para incrementar una fuerza.Una máquina es el conjunto de elementos que se interponen entre una fuente de energía y un trabajo mecánico que se realiza gracias a ella. Las máquinas están formadas por mecanismos que desarrollan funciones elementales. Por lo tanto, definiremos mecanismo como un dispositivo que transforma un movimiento y una fuerza aplicada (llamadas magnitudes motrices o de entrada) en otro movimiento y fuerza resultante (denominadas magnitudes conducidas o de salida) distintos.
Ejemplos:La rueda, la palanca, la polea simple, el tornillo, el plano inclinado , el polipasto, el torno y la cuña son algunas máquinas simples.
1.Punto de apoyo: es el punto sobre el cual se apoya o se mueve la maquina, también llamado fulcro, punto de eje o superficie sobre la cual se apoyan los dos próximos elementos
2.Fuerza motriz o potencia (Fp): es la fuerza que se aplica para hacer funcionar la maquina.
3.Fuerza de resistencia (Fr): es la fuerza que hay que vencer para mover o deformar un cuerpo.
3.Plano inclinado
| En un plano inclinado se aplica una fuerza según el plano inclinado, para vencer la resistencia vertical del peso del objeto a levantar. Dada la conservación de la energía, cuando el ángulo del plano inclinado es más pequeño se puede levantar más peso con una misma fuerza aplicada pero, a cambio, la distancia a recorrer será mayor. |
PALANCA La palanca es una barra rígida con un punto de apoyo o fulcro, a la que se aplica una fuerza y que, girando sobre el punto de apoyo, vence una resistencia. Se cumple la conservación de la energía y, por tanto, la fuerza aplicada por su espacio recorrido ha de ser igual a la fuerza de resistencia por su espacio recorrido (2π·r). 4.Palanca:Máquina simple que consiste esencialmente en una barra que se apoya o puede girar sobre un punto (punto de apoyo o fulcro) y está destinada a vencer una fuerza (resistencia) mediante la aplicación de otra fuerza (potencia). 5.
En las palancas de primer género el punto de apoyo se sitúa entre la fuerza aplicada y la resistencia que hay que vencer (en el ejemplo de arriba la resistencia viene dada por el peso de la piedra que se quiere levantar).
Si se quiere levantar un objeto pesado, se debe utilizar una palanca larga y el punto de apoyo debe estar cerca del objeto que se quiere levantar. En este tipo de palanca la resistencia actúa en dirección opuesta a la fuerza.
En las palancas de segundo género el punto de apoyo está situado en un extremo y cerca de él está la resistencia.
En las palancas de segundo género, la resistencia se mueve en la misma dirección que la fuerza.Cuando se utiliza una carretilla, el eje de la rueda es el punto de apoyo y los brazos proporcionan la fuerza. La resistencia (carga) se encuentra entre el punto de apoyo y la fuerza.
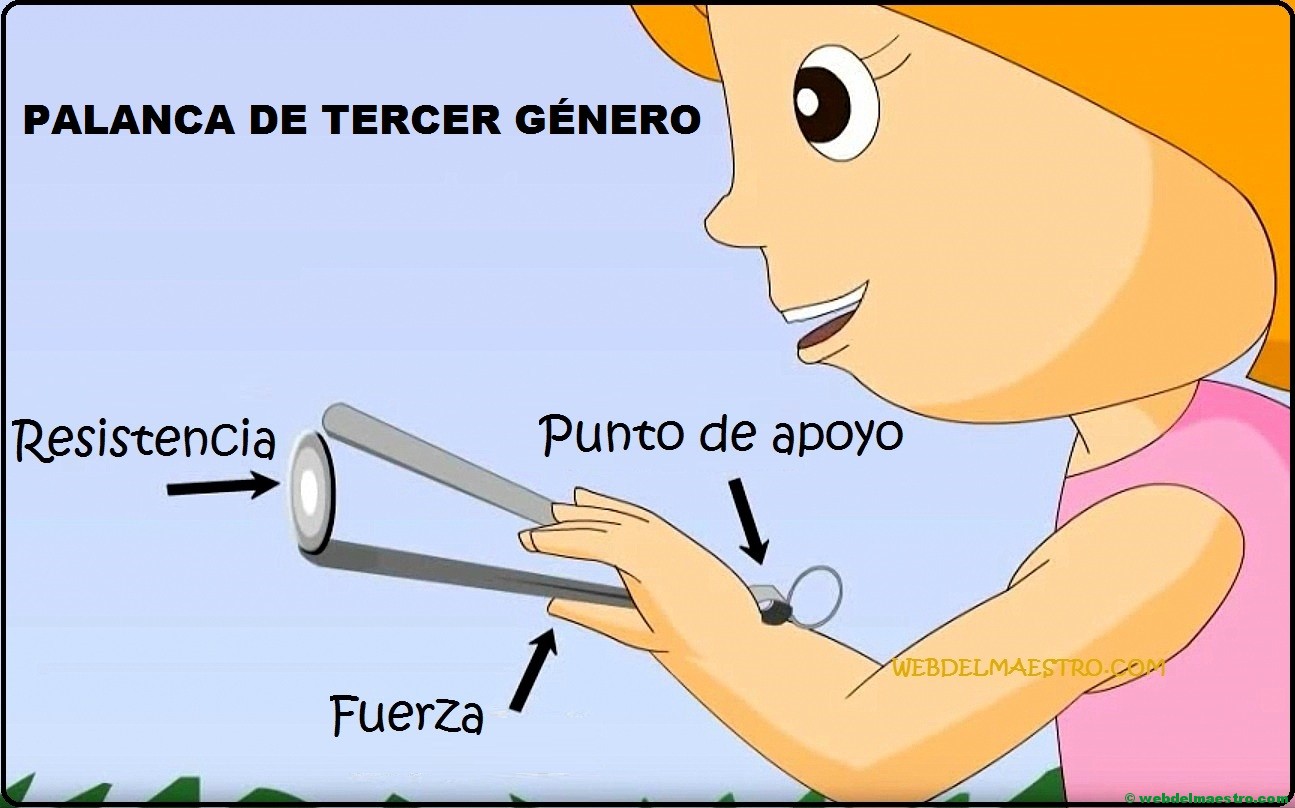
PALANCA DE TERCER GÉNERO
6. Polea fija:En este caso tenemos una sola polea fija sobre la que se enrolla la cuerda (o cadena) de la que suspende por un lado la carga, que ejerce una fuerza de resistencia R, y del otro lado por donde aplicamos la fuerza F para elevar la carga.
|



{kind=link}

7.El plano inclinado es una máquina simple que consiste en una superficie plana que forma un ángulo agudo con el suelo y se utiliza para elevar cuerpos a cierta altura.1
Tiene la ventaja de necesitarse una fuerza menor a la empleada para levantar dicho cuerpo verticalmente, aunque a costa de aumentar la distancia recorrida y vencer la fuerza de rozamiento.
Las leyes que rigen el comportamiento de los cuerpos en un plano inclinado fueron enunciadas por primera vez por el matemático Simon Stevin, en la segunda mitad del siglo XVI.2

8.La idea de máquina simple se originó alrededor del siglo III a. C. con el físico griego Arquímedes, que estudió la palanca, la polea, y el tornillo.414 Descubrió el principio de ventaja mecánica, reflejada en la famosa frase tradicionalmente atribuida15 a Arquímedes con respecto a la palanca: "Dame un punto de apoyo, y moveré la Tierra." (en griego, δῶς μοι πᾶ στῶ καὶ τὰν γᾶν κινάσω)16 con la que expresaba su comprensión de que no hay límite a la cantidad de amplificación de la fuerza que se podría lograr mediante el uso de la ventaja mecánica. Posteriormente, otros físicos griegos definieron las cinco máquinas clásicas simples (sin incluir el plano inclinado) y fueron capaces de calcular con mayor o menor propiedad su ventaja mecánica.10 Por ejemplo, Herón de Alejandría (hacia 10-75 dC) en su obra Mecánica incluye su famosa lista de cinco mecanismos que pueden "poner una carga en movimiento": palanca, torno, polea, cuña, y tornillo,14 describiendo su fabricación y usos.17 Sin embargo la comprensión de los griegos se limitaba a la estática de las máquinas simples (el equilibrio de fuerzas); y no incluía la consideración de efectos dinámicos, el equilibrio entre la fuerza y la distancia, o el concepto de trabajo mecánico.
Durante el Renacimiento la dinámica de las potencias mecánicas, como fueron llamadas las máquinas simples, comenzó a ser estudiada desde el punto de vista de lo lejos que se podía izar una carga, o de la fuerza que se podía aplicar. Esto condujo finalmente al nuevo concepto de trabajo mecánico. En 1586, el ingeniero flamenco Simon Stevin dedujo la ventaja mecánica del plano inclinado, lo que llevó a incluirlo con las otras máquinas simples. La teoría dinámica completa de las máquinas simples fue elaborada por el científico italiano Galileo Galilei en 1600 en su obra Le Meccaniche (Sobre la mecánica), en la que mostraba la similitud matemática subyacente de las distintas máquinas.1819 Fue el primero en comprender que las máquinas simples no crean energía, si no que solamente la transforman.18
Las reglas clásicas de la fricción por deslizamiento en las máquinas fueron descubiertas por Leonardo da Vinci (1452-1519), pero no las incluyó en sus cuadernos. Fueron redescubiertas por Guillaume Amontons (1699) y desarrolladas por Charles-Augustin de Coulomb(1785).20La mecánica moderna ha ampliado la noción sobre las máquinas simples, que describían de forma demasiado sucinta la gran variedad de máquinas complejas que surgieron a partir de la Revolución Industrial. Desde el siglo XIX, distintos autores han compilado listas ampliadas de "máquinas simples", a menudo utilizando términos como máquinas básicas,12 máquinas compuestas,9 o elementos de una máquina, para distinguirlas de las máquinas simples clásicas anteriores. A finales de 1800, Franz Reuleaux21 había identificado cientos de mecanismos elementales, que calificaba como máquinas simples. Representaciones del diseño (KMODDL) de estos dispositivos se pueden encontrar en los modelos cinemáticos de la página web de la Universidad de Cornell.22
A partir de 1970, con la progresiva generalización de las tecnologías digitales, se han desarrollado numerosas herramientas de diseño asistido por computadora (Autodesk Inventor, SolidWorks, Pro/ENGINEER, CATIA y Solid Edge están entre las de mayor difusión) que incluyen en sus rutinas la modelización de diversos mecanismos, permitiendo visualizar de forma virtual el comportamiento cinemático de los dispositivos diseñados.
No hay comentarios:
Publicar un comentario